Experimento
CE110
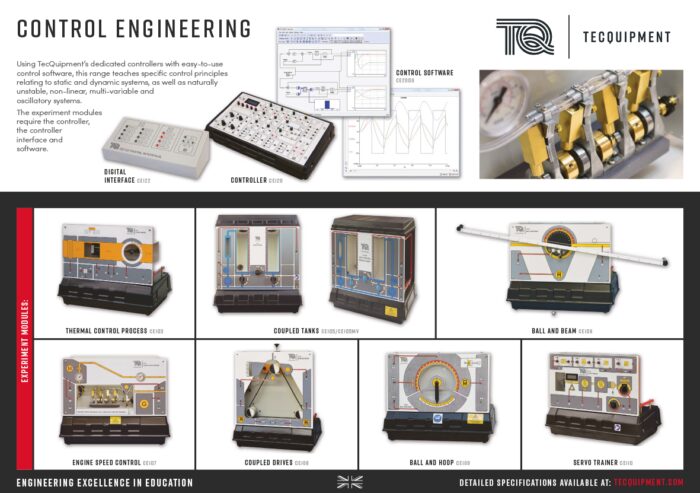
SERVO ENTRENADOR
Es un montaje autónomo de corriente directa en un banco compacto. Es un Servo aparato, diseñado para permitir a los estudiantes en todos los niveles académicos investigar principios básicos y avanzados de control. En particular, el CE110 se ocupa de cuestiones de control relacionadas con el control de posición y velocidad en los servosistemas.
PDF datasheet





If you have any questions or you'd like to discuss a product, please call us.
+44 1159 722 611SERVO ENTRENADOR
El Servo Entrenador CE110 muestra la Servo posición de la corriente directa y los sistemas de control de velocidad, utilizando técnicas industriales típicas. Tiene un Servomotor de corriente directa, un Generador de corriente directa y un volante montado en un eje común. Las señales de control analógicas de 0 a ± 10 V varían la velocidad del eje del servomotor en cualquier dirección. Un sensor óptico mide la velocidad y lo muestra en un medidor digital montado en un panel. El generador de corriente directa carga de forma estática o dinámica el servomotor. Un embrague eléctrico conecta o desconecta el eje a una caja reductora de 30:1 para estudios de control de posición. Un control manual permite al usuario establecer un punto de ajuste de control de posición. Para ajustar la inercia del eje, el CE110 viene con dos discos de inercia intercambiables (volantes). Para experimentos avanzados, el Servo Entrenador incluye circuitos adicionales tipo "bloque" que pueden agregar efectos no lineales y totalmente ajustables de:
- Zona Sin Corriente o "banda muerta"
- Zona anti-muerta
- Histéresis
- Saturación
Learning outcomes
- Pruebas básicas y calibración del transductor
- Cálculo y medición de la respuesta
- Proporcional y además control proporcional integral de la velocidad del servo-sistema
- Cancelación de perturbaciones y control de avance
- Control angular de la posición: control proporcional y retro alimentación de la velocidad
- Control de posición angular y la influencia de no linealidades
- Características del sistema no lineal
-
 SERVO ENTRENADOR
SERVO ENTRENADORServo Trainer - TecQuipment

Auxiliar
WB1